Корзина пуста.







Промышленные роботы
AK70-10 KV100 Модуль питания робота
Наличие:
Доступно для предзаказа
Особенности:
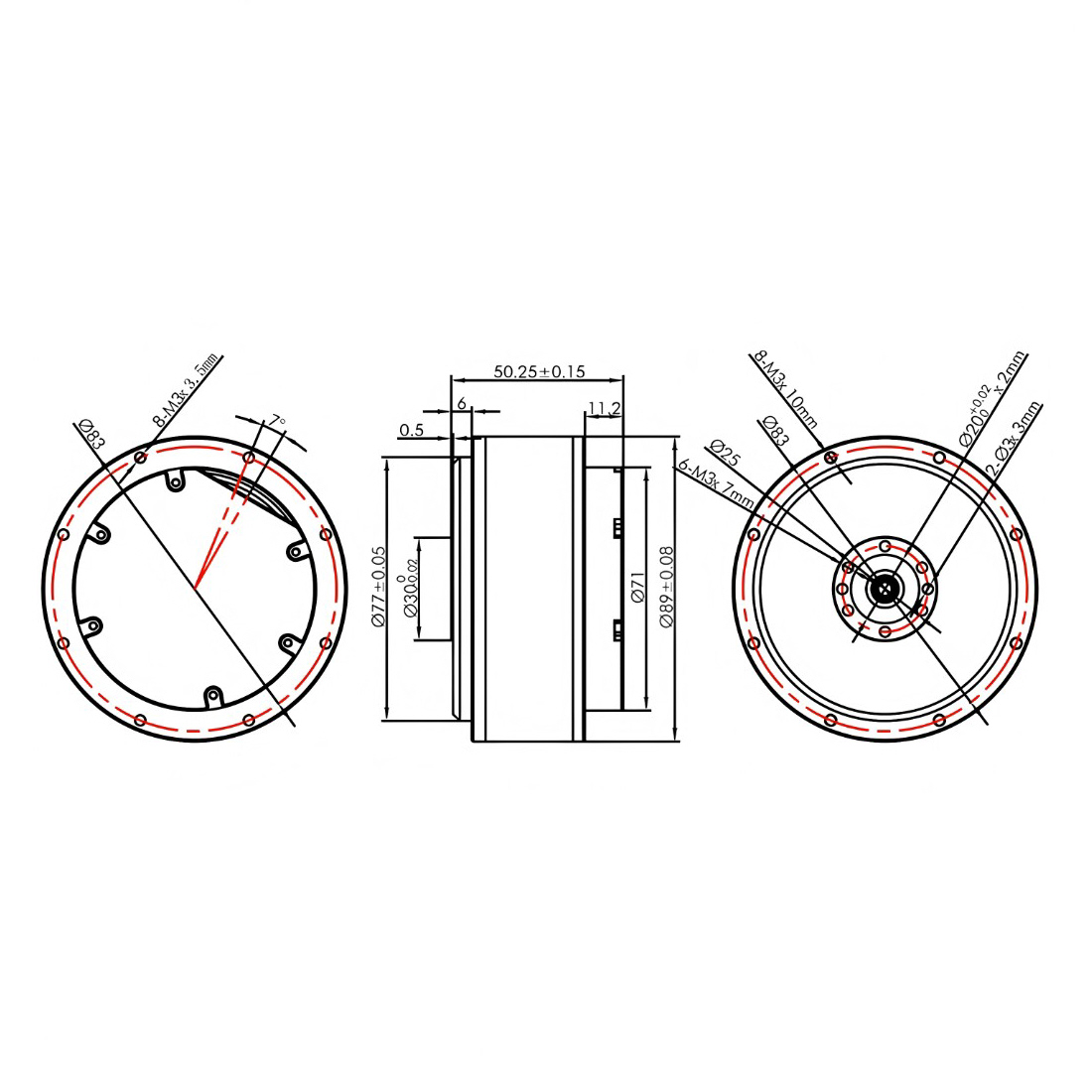
- Размеры двигателя: Ф89*50,25 мм
- Вес двигателя: 521 г
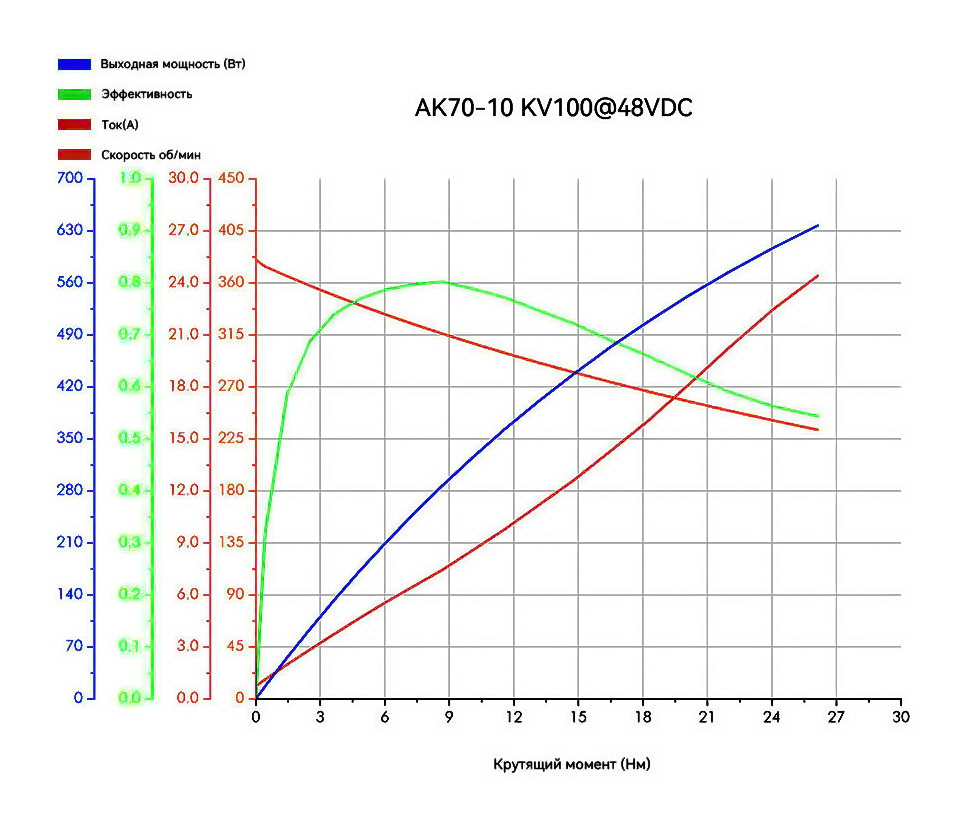
- Пиковый крутящий момент: 24,8 Нм
- Холостая скорость: 480 об/мин
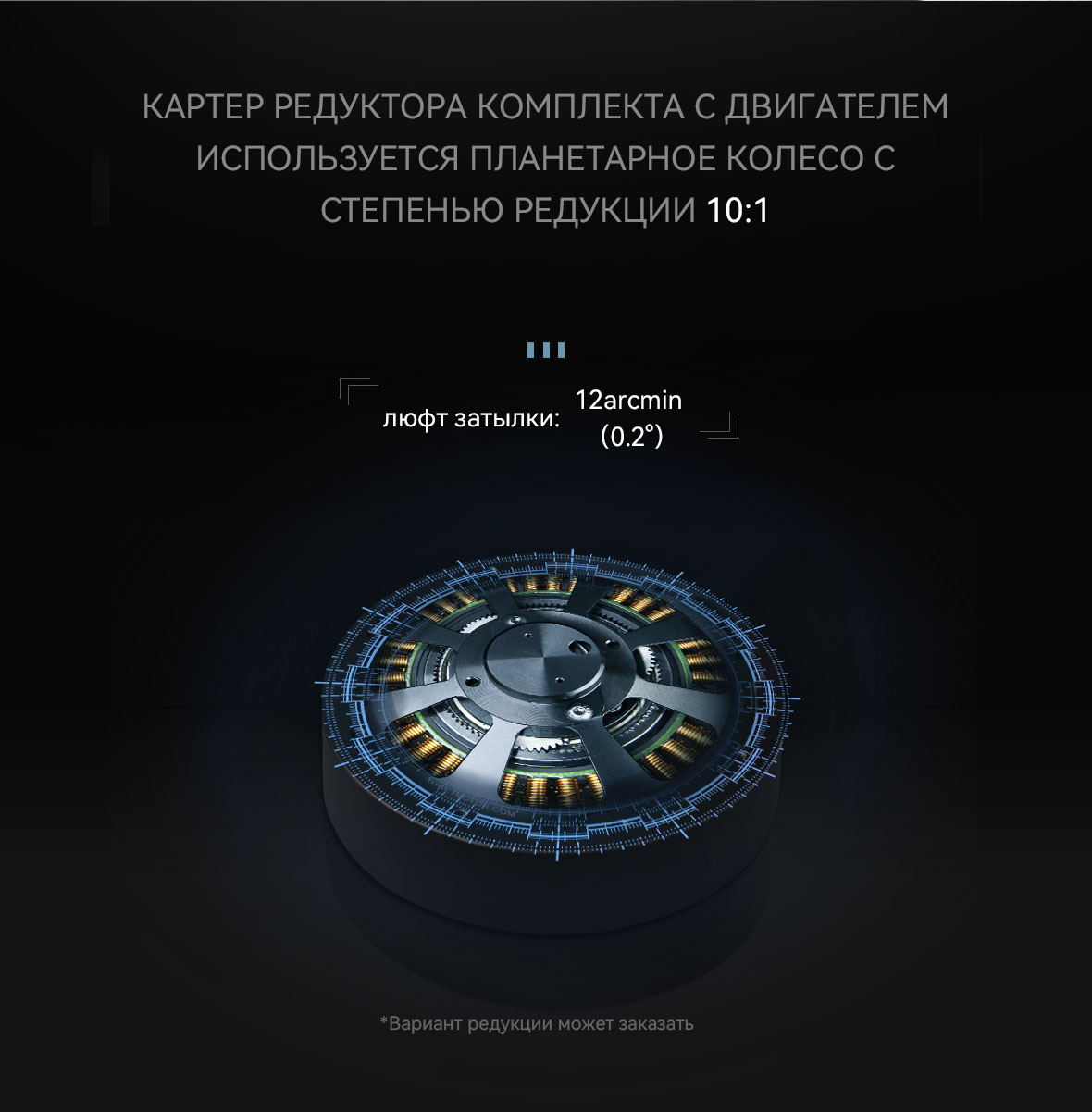
- Интегрированный дизайн: все в одном — двигатель, планетарная коробка передач, драйвер и энкодер, что значительно снижает сложность системы
- Высокая плотность крутящего момента: номинальный выход до 8,3 Нм, пиковый — до 24,8 Нм, подходит для приложений со средней и высокой нагрузкой
- Высокоточная обратная связь: 14-битный магнитный энкодер обеспечивает точное регулирование положения и скорости
- Гибкие режимы управления: поддерживает регулирование положения, скорости, крутящего момента и гибридный режим MIT
- Всесторонняя защита: встроенная защита от перегрузки, пере напряжения/недовольт tage и перегрева гарантирует долговечность и надежность работы
- Широкий диапазон применений: разработан для экзоскелетов, четвероногих роботов, кооперативных манипуляторов и других динамических робототехнических систем
Доступно для предзаказа
Актуатор AK70-10 KV100 для робототехники интегрирует высокопроизводительный бесщёточный двигатель постоянного тока, планетарную коробку передач 10:1, драйверную плату и энкодер в компактное, легко устанавливемое устройство. Благодаря редуктору с передаточным отношением 10:1 он обеспечивает повышенный крутящий момент при сохранении быстрых временных характеристик. Модуль поддерживает многоцикловое управление (позиция, скорость, крутящий момент и гибридный режим MIT), включает в себя разъемы «плаг-н-плей» и автоматическую идентификацию параметров ПИД-регулятора, а также оснащен встроенной защитой от перегрузки, пере напряжения/недовольт tage и перегрева для стабильной работы в тяжелых условиях.
Состав поставки:
- Актуатор AK70-10 KV100 – 1 шт.
- Питательный кабель – 1 шт.
- Серийный CAN-кабель – 1 шт.
- Сертификат соответствия – 1 шт.
| Модель | AK70-10 KV100 Модуль питания робота |
|---|---|
| Применение | Роботизированные ноги, Экзоскелет, AGV |
| Пиковый крутящий момент | 24.8 Нм |
| Тип привода | FOC |
| Пиковый ток | 23.2 А пост. ток, |
| Рабочая температура окружающей среды | -20℃~50℃ |
| KV | 100 об/В |
| Схема соединения обмоток | Delta |
| KT | 0.123 Нм/А |
| Класс изоляции | C |
| Ke | 11.2 В/1000 обм/мин |
| Напряжение пробоя изоляции | 1000V 5mA/2s |
| Межфазное сопротивление | 272 мΩ |
| Сопротивление изоляции | 1000 V 10MΩ |
| Межфазная индуктивность | 113 μH |
| Фаза | 3 фазы |
| Инерция | 753.4788 гсм² |
| Пары полюсов | 21 |
| Константа момента | 0.24 Нм/√Вт |
| Коэффициент понижения редуктора | 10:01 |
| Механическая постоянная времени | 0.74 мс |
| Момент обратного хода | 0.48 Нм |
| Электрическая постоянная времени | 0.42 мс |
| Люфт | 0.12 ° |
| Датчик температуры | NTC MF51B 103F3950 |
| Максимальное отношение момента к весу | 47.6 Нм/кг |
| Шум в дБ на расстоянии 65 см от мотора | 58 |
| Порт CAN | A1257WR-S-4P |
| Макс. осевая нагрузка (динамическая) | 2000 Н |
| Порт UART | A1257WR-S-3P |
| Макс. осевая нагрузка (статическая) | 2520 Н |
| Порт питания | XT30PW-M |
| Номинальное напряжение | 24/48 В |
| Тип энкодера внутренней петли | Magnetic encoder |
| Номинальный момент | 8.3 Нм |
| Разрешение энкодера внутренней петли | 14bit |
| Номинальная скорость | 148/310 об/мин |
| Тип энкодера внешней петли | – |
| Номинальный ток | 7.2 А пост. ток, |
| Разрешение энкодера внешней петли | – |
| Количество энкодеров | 1 |
| Габаритные размеры (ДxШxВ) | Ф89*50,25 мм |
| Размеры упаковки (ДxШxВ) | 540x290x290 мм (10 штук) |
| Вес Нетто/Брутто | 521 грамм /8,5 кг (10 штук) |
Роботизированный привод Серия AK
| Модель | Номинальное напряжение (В) | Номинальная мощность (Вт) | Номинальный крутящий момент (Нм) | Номинальный ток (А) | Номинальная скорость (об/мин) | Пиковый крутящий момент (Нм) | Пиковый ток (А) | Скорость холостого хода (об/мин) | Передаточное отношение | Вес (г) | Размер (диаметр * длина) мм | Плата драйвера | Энкодер |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AK10-9 V3.0 KV60 | 48 | 442 | 18 | 10.7 | 235 | 53 | 31.9 | 320 | 9:1 | 940 | Ф98*61.7 | Да | Dual |
| AK10-9 V2.0 KV60 | 24/48 | 430 | 18 | 10.6 | 109/228 | 48 | 29.8 | 160/320 | 9:1 | 960 | Ф98*61.7 | Да | Dual |
| AK10-9 V2.0 KV100 | 24/48 | 720 | 15 | 16.2 | 205/421 | 38 | 41.2 | 266/533 | 9:1 | 960 | Ф98*61.7 | Да | Dual |
| AK80-9 V3.0 KV100 | 48 | 368 | 9 | 12 | 390 | 22 | 28 | 570 | 9:1 | 490 | Ф98*38.5 | Да | Один |
| AK80-9 KV100 | 48 | 330 | 9 | 10.3 | 390 | 18 | 22.3 | 533 | 9:1 | 485 | Ф98*38.5 | Да | Один |
| AK80-8 KV60 | 48 | 230 | 10 | 6.9 | 243 | 25 | 21 | 360 | 8:1 | 570 | Ф98*43.9 | Да | Dual |
| AK80-6 KV100 | 48 | 340 | 6 | 9.7 | 603 | 12 | 20 | 800 | 6:1 | 485 | Ф98*38.5 | Да | Один |
| AK80-64 KV80 | 24/48 | 220 | 48 | 7 | 23/48 | 120 | 19 | 37/75 | 64:1 | 850 | Ф98*61.9 | Да | Один |
| AK70-10 KV100 | 24/48 | 230 | 8.3 | 7.2 | 148/310 | 24.8 | 23.2 | 240/480 | 10:1 | 521 | Ф89*50.25 | Да | Один |
| AK70-9 KV60 | 48 | 230 | 8.5 | 6.25 | 260 | 29.2 | 23.8 | 320 | 9:1 | 540 | Ф89*46 | Да | Dual |
| AK60-39 V3.0 KV80 | 48 | 176 | 24 | 4.5 | 70 | 72 | 17 | 98 | 39:1 | 750 | Ф79*67 | Да | Dual |
| AK60-6 V3.0 KV80 | 24/48 | 74 | 3 | 3.8 | 233/490 | 9 | 10.3/11.2 | 320/640 | 6:1 | 380 | Ф79*43 | Да | Один |
| AK60-6 V1.1 KV140 | 24 | 130 | 3 | 6.5 | 420 | 9 | 22.7 | 560 | 6:1 | 368 | Ф79*39.5 | Да | Один |
| AK60-6 V1.1 KV80 | 24 | 74 | 3 | 3.8 | 233 | 9 | 13.1 | 320 | 6:1 | 368 | Ф79*39.5 | Да | Один |
| AK45-36 KV80 | 24 | 33 | 8 | 2 | 40 | 24 | 6.5 | 52 | 36:1 | 340 | φ55*54 | Да | Один |
| AK40-10 KV170 | 24 | 59 | 1.3 | 2.7 | 370 | 4.1 | 7.3 | 435 | 10:1 | 185 | φ53*37 | Да | Один |
| AK45-10 KV75 | 24 | 39 | 2.5 | 2.1 | 150 | 7 | 5 | 180 | 10:1 | 260 | Ф53*43 | Да | Один |
Роботизированный привод серии AKE
| Модель | Номинальное напряжение (В) | Номинальная мощность (Вт) | Номинальный крутящий момент (Нм) | Номинальный ток (А) | Номинальная скорость (об/мин) | Пиковый крутящий момент (Нм) | Пиковый ток (А) | Скорость холостого хода (об/мин) | Передаточное отношение | Вес (г) | Размер (диаметр * длина) мм | Плата драйвера | Энкодер |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AKE90-8 KV35 | 48 | 700 | 55 | 21 | 120 | 170 | 72 | 210 | 8:1 | 1400 | Ф107.5*43.5 | No | |
| AKE80-8 KV30 | 48 | 188 | 12 | 4.8 | 150 | 30 | 12 | 195 | 8:1 | 570 | Ф87*32 | No | |
| AKE60-8 KV80 | 24 | 95 | 5 | 4.8 | 180 | 12.5 | 12 | 240 | 8:1 | 260 | Ф69*25 | No |
Роботизированный привод Серия AKA
| Модель | Номинальное напряжение (В) | Номинальная мощность (Вт) | Номинальный крутящий момент (Нм) | Номинальный ток (А) | Номинальная скорость (об/мин) | Пиковый крутящий момент (Нм) | Пиковый ток (А) | Скорость холостого хода (об/мин) | Передаточное отношение | Вес (г) | Размер (диаметр * длина) мм | Плата драйвера | Энкодер |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AKA10-9 KV60 | 48 | 205 | 18 | 10.6 | 109 | 53 | 32 | 320 | 9:1 | 1060 | ∅100*70 | Да | Один |
| AKA60-6 KV80 | 24/48 | 62 | 3 | 4 | 200/400 | 9 | 11.2 | 320/640 | 6∶1 | 460 | Ф80*51.2 | Да | Один |
Похожие товары
-
Промышленные роботы
KR 7 R700-3 промышленный робот-манипулятор
Особенности:
- Количество осей – 6 осей
- Количество управляемых осей – 6 осей
- Номинальная грузоподъёмность – 7 кг
- Максимальная грузоподъёмность – 10,2 кг
- Объем рабочей зоны – 1,6 м³
- Повторяемость позы (ISO 9283)± 0,02 мм
- Максимальный радиус действия – 703 мм
Промышленный робот этого семейства продуктов состоит из следующих компонентов:
- Манипулятор
- Контроллер робота
- Соединительные кабели
- Пульт обучения (KUKA smartPAD-2)
- Программное обеспечение
- Опции, аксессуары
SKU: n/a -
Промышленные роботы
KR 8 R2010-2 промышленный робот-манипулятор
Особенности:
- Высокая производительность и эффективность. Надежность, гибкость и высокая производительность для средних допустимых нагрузок.
- Номинальная нагрузка: 8 Кг.
- Макс. нагрузка – 9.8 Кг
- Кол-во осей: 6.
- Точность: ±0,04 мм.
- Макс. охват: 2013 мм.
- Узкая конструкция экономит ценное место и обеспечивает лучший доступ в стесненных условиях с большим рабочим пространством и сокращенными контурами помех
- Возможно любое монтажное положение: пол, потолок, стена, под любым углом
- Устойчивые шарниры с прочными редукторами и двигателями — не только для загрузки и разгрузки, но также и для окончательной обработки и прочих технологических задач
- Простой и стандартизированный монтаж технологического оснащения на оси 3 для всех роботов с полым валом
SKU: n/a -
Промышленные роботы
KUKA KR70 R2100-2 промышленный робот-манипулятор
Особенности:
- Высокая производительность и эффективность. Надежность, гибкость и высокая производительность для средних допустимых нагрузок.
- Нагрузка: 70 кг.
- Кол-во осей: 6.
- Точность: ±0,04 мм.
- Макс. охват: 2101 мм.
- Низкие затраты на содержание.
- Благодаря гибкому монтажному положению и трансформируемой грузоподъемности подходит для различных областей применения и может быть адаптирован к конкретным требованиям.
- Максимальная эксплуатационная готовность.
- Оптимизированная конструкция.
- Защита от электростатического разряда.
SKU: n/a -
Промышленные роботы
Yaskawa Motoman AR1440 сварочный робот
Особенности:
- Грузоподъемность 12 кг
- Количество осей – 6
- Рабочий диапазон – 1440 мм
- Высокая производительность и эффективность. Надежность, гибкость и высокая производительность для средних допустимых нагрузок.
- Увеличенный диаметр полого запястья (от 42 до 50 мм)
- В двое больше грузоподъемность по сравнению с другими моделями в своем классе
- Возможна установка различного рода датчиков
- Возможно применения в процессе сварки, где обычно используется более крупный робот
- Оптимизировано сконструированная рука робота исключает столкновения и интерференции в кондукторе
- Легок в обслуживании за счет уникального промышленного дизайна руки, что предотвращает попадание брызг
- Возможность установки дополнительного кабеля (мощности, подачи воздуха и т.п.)
- Возможно любое монтажное положение: пол, потолок, стена, под любым углом
- Простой и стандартизированный монтаж технологического оснащения на оси 3 для всех роботов с полым валом
SKU: n/a



